Содержание
1.2. Классификация механических характеристик.
Зависимость между скоростью вращения
и моментом сопротивления механизма
называется механической характеристикой
механизма.
Для рассмотрения свойств механических
характеристик можно воспользоваться
упрощенной формулой, справедливой для
большинства механизмов:
Исходя из этой формулы можно выделить
четыре типа механических характеристик:
1) не зависящая от скорости механическая
характеристика
,
2) линейно возрастающая механическая
характеристика
,
3) нелинейно возрастающая характеристика
(параболическая)
— вентиляторная характеристика,
4) нелинейно спадающая характеристика
,
— обратно пропорционален скорости.
Рис. 1-4. Основные типы механических
характеристик.
Механической характеристикой
электродвигателя называется зависимость
его скорости от вращающего момента, т.
е.
.
П
очти
все электродвигатели обладают тем
свойством, что скорость их является
убывающей функцией момента двигателя.
Это относится почти ко всем обычным
электродвигателям, применяемым в
промышленности. Однако степень изменения
скорости с изменением момента у разных
двигателей различна и характеризуется
так называемой жесткостью их
механических характеристик.
Механические характеристики
электродвигателей можно разделить на
три основные категории:
1. Абсолютно жесткая механическая
характеристика, при которой скорость
с изменением момента остается неизменной.
Такой характеристикой обладают синхронные
двигатели (прямая 1 на рис. 1-5).
2
Рис. 1-5. Механические характеристики
двигателей.
. Жесткая механическая характеристика,
Жесткая механическая характеристика,
при которой скорость с изменением
момента хотя и уменьшается, но в малой
степени. Жесткой механической
характеристикой обладают двигатели
постоянного тока независимого возбуждения,
а также асинхронные двигатели в пределах
рабочей части механической характеристики
(кривая 2 на рис. 1-5). Для асинхронного
двигателя степень жесткости в различных
точках механической характеристики
различна (рис. 1-6). Между наибольшими
(критическими) значениями моментов в
двигательном
и генераторном
режимах характеристика асинхронного
двигателя оказывается сравнительно
жесткой.
3
Рис. 1-6. Механическая характеристика
асинхронного двигателя.
. Мягкая механическая характеристика
отличается значительным изменением
скорости с изменением момента. Такой
характеристикой обладают двигатели
последовательного возбуждения, особенно
в зоне малых моментов (кривая 3 на
рис. 1-5). Для этих двигателей степень
жёсткости не остаётся постоянной для
всех точек характеристики.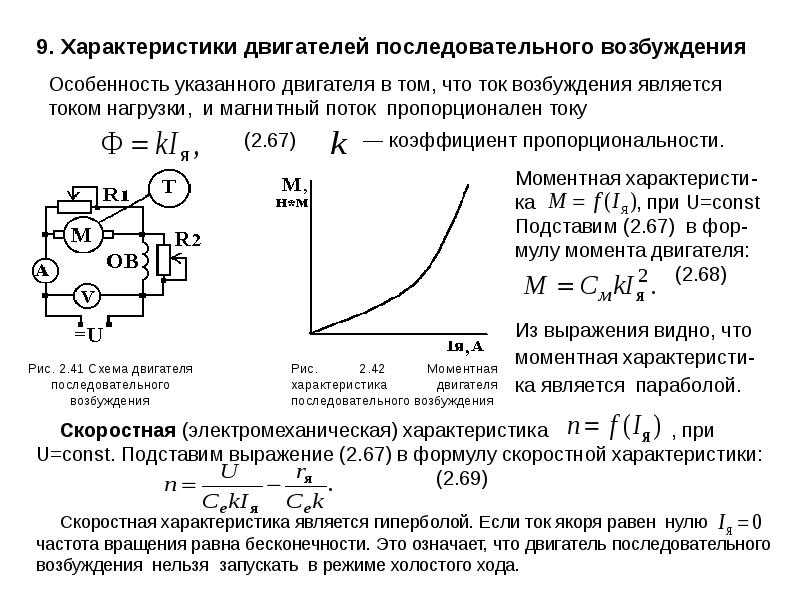 Двигатели
Двигатели
смешанного возбуждения могут быть
отнесены ко второй или третьей группе
в зависимости от степени жёсткости
механической характеристики.
Рис. 1-7. Схема включения двигателя
постоянного тока
независимого возбуждения.
В установившемся режиме работы двигателя
приложенное напряжение U
определяется последующему выражению:
(1.1)
где Iя — ток
якорной цепи,
— суммарное сопротивление якорной
цепи,
.
Мгновенное значение ЭДС:
,
отсюда
,
(1.2)
где С — конструктивный коэффициент,
N — число активных
проводников обмотки якоря,
а — число пар параллельных ветвей
обмотки якоря.
Подставив 1.2 в 1.1 получим:
(1. 3)
3)
Выражение 1.3 (зависимость угловой
скорости вращения от тока в якоре)
принято называть скоростной
характеристикой двигателя.
Для получения уравнения механической
характеристики необходимо найти
зависимость скорости вращения от момента
двигателя.
Момент, развиваемый двигателем, связан
с током якоря и магнитным потоком
следующей зависимостью:
(1.4)
отсюда
(1.5)
Подставив формулу 1.5 в 1.3, получим:
(1.6)
Выражение 1.6 — механическая характеристика
двигателя.
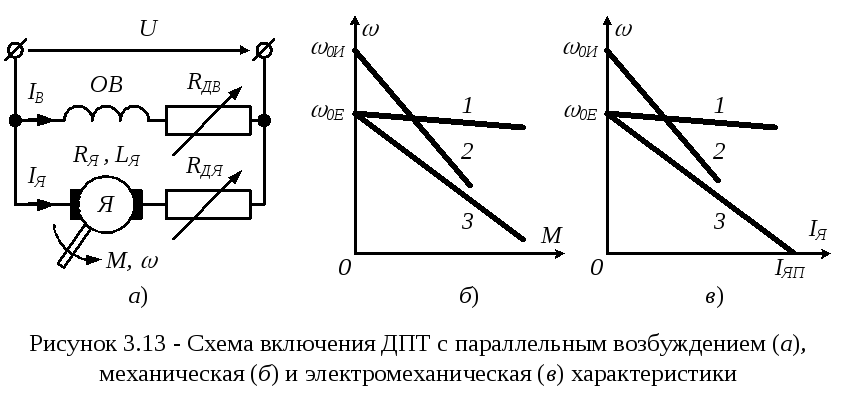
Н
а
рис. 1-8 представлены механические
характеристики двигателя независимого
возбуждения для различных сопротивлений
в якорной цепи. При М = 0 все
характеристики проходят через одну
точку, расположенную на оси ординат.
Скорость в этой точке называется
скоростью идеального холостого хода
(обозначается
)
и определяется по формуле:
(1. 7)
7)
В
Рис. 1-8. Механические
характеристики двигателей независимого
возбуждения
ерхняя характеристика из всех,
изображённых на рис. 1-8 принято называть
естественной.
Естественной характеристикой
называется такая характеристика
двигателя, которая получается при
отсутствии внешних сопротивлений в
якорной цепи и номинальных значениях
напряжения и магнитного потока.
Если в цепь якоря двигателя включено
дополнительное сопротивление (реостат),
то механические характеристики,
получаемые при этом, называются
искусственными или реостатными.
Реостатные характеристики имеют
значительно больший наклон к оси
моментов, чем у естественной характеристики,
т.е. обладают меньшей жёсткостью. Чем
больше введённое в цепь якоря сопротивление,
тем круче идёт характеристика, тем
меньше её жёсткость.
Механическая характеристика — двигатель — постоянный ток
Cтраница 3
Уравнение ( 4 — 12) показывает, что механические характеристики двигателя постоянного тока при изменении тока возбуждения даже при угле а 0 в естественней схеме включения ртутного выпрямителя обладают недостаточной жесткостью.
[31]
| Механические характеристики двигателя постоянного тока.
[32] |
Из выражения ( 2 — 3) следует, что жесткость механической характеристики двигателя постоянного тока ( отношение приращения скорости к приращению момента нагрузки) при работе от сети бесконечной мощности равна б — 1 и не зависит от напряжения питания.
[33]
Для дальнейшего изучения свойств электродвигателей запишем основные формулы, необходимые для расчета механических характеристик двигателей постоянного тока.
[34]
Механическая характеристика кранового двигателя постоянного тока с последовательной обмоткой возбуждения приведена на рис. 1.1, а график его реостатного пуска — на рис. 1.2. Механические характеристики двигателей постоянного тока с параллельной обмоткой возбуждения, смешанной, а также асинхронных электродвигателей переменного тока с фазовым и короткозамкну-тым ротором и график пуска последнего приведены на рис. 1.3 — 1.7 соответственно.
1.3 — 1.7 соответственно.
[35]
Поэтому механические характеристики двигателей постоянного тока имеют такой же вид, как и соответствующие частотные характеристики. Из этой характеристики видно, что его частота вращения с ростом момента нагрузки снижается незначительно, так как ток возбуждения при параллельном включении обмотки возбуждения и соответственно магнитный поток двигателя остаются практически неизменными, а сопротивление цепи якоря относительно мало.
[36]
| Переходный процесс при линейных статических характеристиках.
[37] |
При линейном характере зависимости момента сопротивления от скорости линейность динамического момента имеет место в приводах с двигателями постоянного тока независимого возбуждения практически во всей области изменения скорости, если поток реакции якоря не нарушает линейной зависимости тока якоря двигателя и его момента от скорости. На рабочих участках механических характеристик двигателей постоянного тока последовательного возбуждения и асинхронных при линейной механической характеристике механизма зависимость динамического момента от скорости также близка к линейной.
На рабочих участках механических характеристик двигателей постоянного тока последовательного возбуждения и асинхронных при линейной механической характеристике механизма зависимость динамического момента от скорости также близка к линейной.
[38]
| Рабочие характеристики двигателя параллельного возбуждения.| Механические характеристики двигателей при различных схемах возбуждения.
[39] |
Характеристика соДЛ1) при постоянном напряжении сети и неизменных сопротивлениях регулировочных реостатов называется механической характеристикой двигателя. На рис. 5.63 представлены механические характеристики двигателей постоянного тока при различных схемах возбуждения.
[40]
Синхронный двигатель, получающий питание от преобразователя частоты со звеном постоянного тока, управляемого в функции угла поворота ротора, называется вентильным. Механические характеристики вентильного двигателя аналогичны механическим характеристикам двигателя постоянного тока, управляемого изменением напряжения на якоре.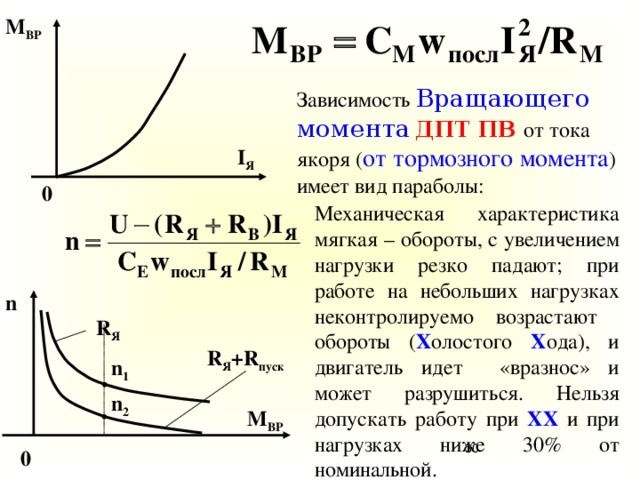
[41]
Синхронный двигатель, питаемый от преобразователя частоты со звеном постоянного тока, управляемого в функции положения ротора, называется вентильным двигателем. Вентильный двигатель имеет механические характеристики, аналогичные механическим характеристикам двигателя постоянного тока, уп-эавляемого изменением напряжения питания якоря.
[42]
| Механические характеристики и графики переходною щю — иссса при динамическом торможении двигателя.
[43] |
В процессе динамического торможения скорость двигателя изменяется в соответствии с его механической характеристикой, которая для асинхронных двигателей на участке, где s s Kp, может быть приближенно заменена отрезком прямой. На рис. V.5, а показаны для режима динамического торможения механические характеристики двигателей постоянного тока независимого ( /) и последовательного ( 2) возбуждения ( при независимом включении обмотки возбуждения), а также механические характеристики асинхронных двигателей с контактными кольцами ( 3) при значительных добавочных сопротивлениях в цепи ротора.
[44]
Вентильным двигателем называется синхронный двигатель, питаемый от преобразователя частоты со звеном постоянного тока, управляемого в функции положения ротора. Вентильный двигатель имеет механические характеристики двигателя постоянного тока, управляемого изменением напряжения питания якоря.
[45]
Страницы:
1
2
3
Уравнение крутящего момента и связь с двигателями постоянного тока
Вы здесь: Главная / Часто задаваемые вопросы + основы / Уравнение крутящего момента и связь с двигателями постоянного тока
By Danielle Collins Оставить комментарий
Понимание уравнения крутящего момента и соотношения между скоростью и крутящим моментом является важной частью выбора и эксплуатации двигателя постоянного тока.
Двигатели постоянного тока являются относительно простыми машинами: когда нагрузка на двигатель постоянна, скорость пропорциональна напряжению питания.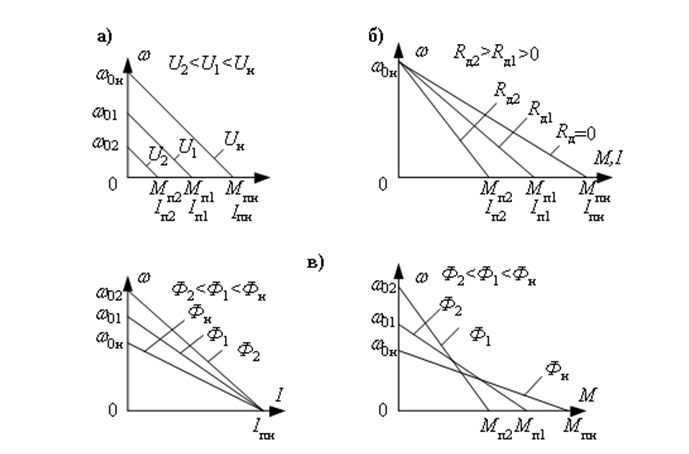 А при постоянном напряжении питания скорость обратно пропорциональна нагрузке на двигатель. Это второе соотношение — между скоростью и нагрузкой (или крутящим моментом) — обычно отображается на кривой крутящего момента двигателя.
А при постоянном напряжении питания скорость обратно пропорциональна нагрузке на двигатель. Это второе соотношение — между скоростью и нагрузкой (или крутящим моментом) — обычно отображается на кривой крутящего момента двигателя.
Изображение предоставлено: National Instruments Corporation
Обратная зависимость между скоростью и крутящим моментом означает, что увеличение нагрузки (крутящего момента) на двигателе приведет к снижению скорости. Это может быть продемонстрировано уравнением моторного крутящего момента DC:
Где:
T = крутящий момент мотоцикла
V = напряжение питания
ω = скорость ротации
2 K = Констира
R = сопротивление
Конечно, постоянная двигателя (k) не меняется, а сопротивление (R) в обмотках двигателя постоянно. Следовательно, когда напряжение питания (V) постоянно, крутящий момент (T) обратно пропорционален скорости (ω).
Преобразовывая скорость, мы видим ту же обратную зависимость от крутящего момента:
Чтобы увидеть вывод уравнения крутящего момента двигателя постоянного тока, ознакомьтесь с этой статьей.
Обратная зависимость означает, что кривая крутящий момент-скорость представляет собой нисходящую линию с отрицательным наклоном. Кривая крутящий момент-скорость начинается на пересечении оси Y, где крутящий момент максимален, а скорость равна нулю. Это пусковой крутящий момент — максимальный крутящий момент, когда двигатель работает при номинальном напряжении. Кривая имеет наклон вниз до пересечения с осью X, то есть при нулевом крутящем моменте и максимальной скорости. Эта точка известна как скорость холостого хода — скорость при работе при номинальном напряжении и нулевой нагрузке.
Поскольку кривая момент-скорость представляет собой прямую линию, несложно найти крутящий момент, который двигатель может создать при заданной скорости, или, наоборот, найти скорость двигателя при заданной нагрузке (крутящем моменте) на валу. Вспомните уравнение для прямой линии:
Где:
y = значение переменной оси y, подлежащее определению
м = наклон линии; изменение y, деленное на изменение x
x = значение переменной оси x, заданное
b = точка пересечения y; точка, в которой линия пересекает ось Y
Используя это уравнение для кривой крутящий момент-скорость, мы можем найти крутящий момент двигателя при заданной скорости.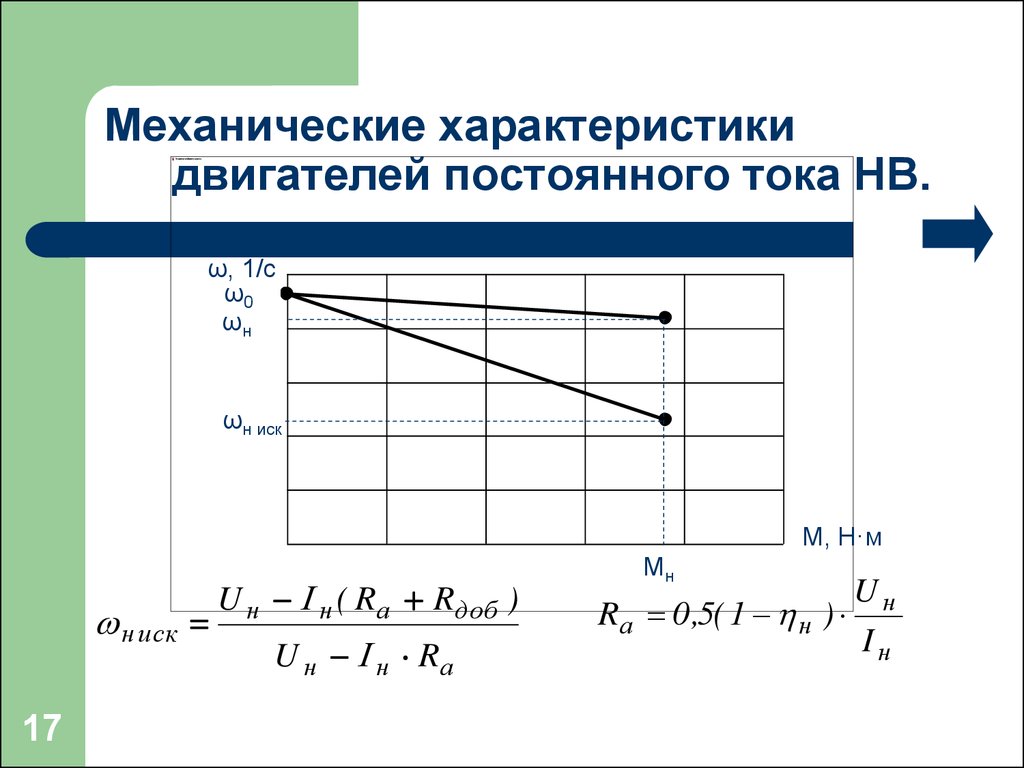 В этом случае переменные в линейном уравнении представляют собой следующее:
В этом случае переменные в линейном уравнении представляют собой следующее:
y = определяемый крутящий момент
m = изменение крутящего момента, деленное на изменение скорости
x = заданная скорость
b = момент опрокидывания (значение, при котором линия пересекает ось Y)
Уравнение прямой также можно изменить, чтобы определить скорость двигателя при заданном крутящем моменте:
Двигатели постоянного тока – преимущества и опасности при эксплуатации
Преимущества и опасности при эксплуатации двигателей постоянного тока
Двигатели постоянного тока в магазине
Двигатель постоянного тока преобразует электрическую энергию в механическую. В двигателе постоянного тока используется постоянный ток, другими словами, ток течет в одном направлении.
Двигатель постоянного тока обычно состоит из: сердечника якоря, воздушного зазора, полюсов и ярма, образующих магнитную цепь; обмотка якоря, обмотка возбуждения, щетки и коммутатор, образующие электрическую цепь; и рама, концевые колокола, подшипники, опоры щеток и вал, которые обеспечивают механическую поддержку. См. вырез двигателя постоянного тока в нижней части этой страницы ресурсов.
См. вырез двигателя постоянного тока в нижней части этой страницы ресурсов.
Преимущества двигателей постоянного тока
Двигатели постоянного тока имеют два основных преимущества: Изменение скорости и Крутящий момент .
Изменение скорости
Изменение скорости достигается изменением либо напряжения якоря, либо напряжения возбуждения, либо их комбинации. Например, двигатель с
базовая скорость 1750 об/мин и напряжение якоря 500 В постоянного тока будут работать при 875 об/мин при снижении напряжения якоря на 50% (до 250 В постоянного тока).- Управление напряжением якоря — Для этого типа управления скоростью напряжение якоря изменяется при поддержании постоянного возбуждения шунтирующего поля. Выходной крутящий момент двигателя постоянного тока пропорционален произведению потока главного полюса, тока якоря и постоянной машины, которая является функцией обмоток якоря. Следовательно, при управлении скоростью вращения якоря и постоянном возбуждении шунтирующего поля момент зависит только от тока якоря.
 Другими словами, при номинальном токе якоря крутящий момент постоянен.
Другими словами, при номинальном токе якоря крутящий момент постоянен.Двигатель постоянного тока, работающий с регулированием напряжения якоря и возбуждением с фиксированным полем, будет развивать номинальный крутящий момент при номинальном токе якоря независимо от скорости. Обычно это называется работой с постоянным крутящим моментом.
- Управление шунтирующим полем — При регулировании скорости за счет ослабления поля напряжение, подаваемое на шунтирующее поле, регулируется реостатом с переменным сопротивлением, включенным последовательно с цепью шунтирующего поля, или путем изменения напряжения источника питания шунтирующего поля.
Уменьшение напряжения шунтирующего поля уменьшает ток возбуждения, что, в свою очередь, уменьшает поток возбуждения, позволяя увеличить скорость двигателя. Нельзя использовать увеличение напряжения возбуждения для получения скорости ниже базовой, так как возбуждение будет перегреваться при токе выше номинального. Двигатели постоянного тока, работающие при постоянном напряжении якоря и с ослаблением поля, имеют постоянную мощность в лошадиных силах во всем диапазоне скоростей.
Значения скорости управления полем находятся в диапазоне от 1:1 до 6:1. - Комбинация управления напряжением якоря и шунтирующим полем — Использование обоих методов управления скоростью дает широкий диапазон скоростей. Управление напряжением якоря используется для скоростей ниже базовой скорости, что обеспечивает постоянный крутящий момент. Управление шунтирующим полем используется для получения скоростей выше базовых, что обеспечивает постоянную мощность.
- Управление напряжением якоря — Для этого типа управления скоростью напряжение якоря изменяется при поддержании постоянного возбуждения шунтирующего поля. Выходной крутящий момент двигателя постоянного тока пропорционален произведению потока главного полюса, тока якоря и постоянной машины, которая является функцией обмоток якоря. Следовательно, при управлении скоростью вращения якоря и постоянном возбуждении шунтирующего поля момент зависит только от тока якоря.
Момент затяжки
Определение электродвигателя — это устройство, которое преобразует электрическую энергию в механическую энергию. На самом деле двигатель можно было бы лучше определить как «генератор крутящего момента». Крутящий момент можно определить как вращающую силу, которая стремится произвести вращение на валу. Основное преимущество двигателя постоянного тока заключается в том, что он может развивать постоянный крутящий момент в широком диапазоне скоростей.
Источник питания является важным фактором при применении двигателей постоянного тока.
Наиболее распространенным способом подачи постоянного напряжения на двигатель от сети переменного тока является использование электронного привода. В зависимости от конструкции привод обеспечивает форму импульса, подобную идеальному напряжению батареи. Эти импульсы характеризуются форм-фактором, который определяется NEMA (Национальной ассоциацией производителей электрооборудования) как код источника питания. Коды основаны на качестве выходной мощности. Вопросы применения включают стоимость привода, эксплуатационные расходы (эффективность), надежность и качество выходной мощности.- Nema Power Code A — этот источник питания представляет собой источник постоянного тока, такой как батарея или генератор. Высокочастотные источники питания с ШИМ будут соответствовать коду мощности A NEMA. Все двигатели постоянного тока с рейтингом NEMA могут работать от этого типа источника питания без использования внешних реакторов.
- Nema Power Code C — этот источник питания близок к чистому и состоит из шести кремниевых управляемых выпрямителей (SCRS), соединенных по трехфазной двухполупериодной мостовой схеме. Все двигатели постоянного тока с рейтингом NEMA могут работать от этого типа источника питания без использования внешних реакторов.
- Nema Power, код D — мощность, код D, содержит немного больше искажений, чем код C, и состоит из трех SCRS и трех диодных выпрямителей, соединенных по трехфазной двухполупериодной мостовой схеме. На клеммах якоря используется выпрямитель свободного хода. Двигатели мощностью 250 л.с. или менее могут работать от этого типа питания без использования внешних дросселей. Двигатели мощностью 300 л.с. и выше могут потребовать использования внешних дросселей при работе от этого типа источника питания.
- Nema Power Code E — Этот источник питания имеет среднее качество и состоит из трех управляемых выпрямителей (SCRS), соединенных по трехфазной полуволновой мостовой схеме. Для большинства двигателей постоянного тока потребуется некоторое снижение номинальных характеристик или использование внешнего дросселя при использовании с этим типом источника питания. Проконсультируйтесь с заводом-изготовителем, когда используется этот тип источника питания.
- Nema Power Code K — этот источник питания имеет ограниченное применение и состоит из двух управляемых выпрямителей (SCR) и двух диодных выпрямителей, соединенных в однофазную двухполупериодную мостовую конфигурацию. На клеммах якоря двигателя можно использовать выпрямитель свободного хода. Этот тип источника питания обычно используется для двигателей мощностью до 7-1/2 л.с.
 Другими словами, при номинальном токе якоря крутящий момент постоянен.
Другими словами, при номинальном токе якоря крутящий момент постоянен.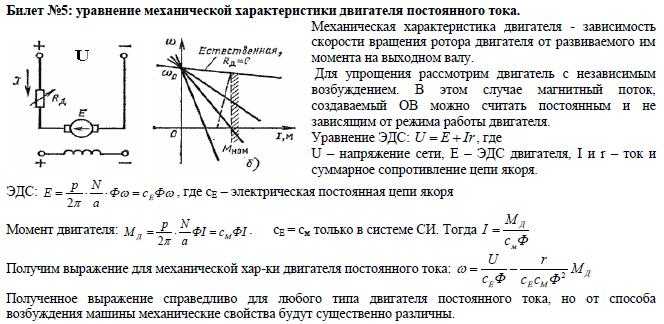 Значения скорости управления полем находятся в диапазоне от 1:1 до 6:1.
Значения скорости управления полем находятся в диапазоне от 1:1 до 6:1. Наиболее распространенным способом подачи постоянного напряжения на двигатель от сети переменного тока является использование электронного привода. В зависимости от конструкции привод обеспечивает форму импульса, подобную идеальному напряжению батареи. Эти импульсы характеризуются форм-фактором, который определяется NEMA (Национальной ассоциацией производителей электрооборудования) как код источника питания. Коды основаны на качестве выходной мощности. Вопросы применения включают стоимость привода, эксплуатационные расходы (эффективность), надежность и качество выходной мощности.
Наиболее распространенным способом подачи постоянного напряжения на двигатель от сети переменного тока является использование электронного привода. В зависимости от конструкции привод обеспечивает форму импульса, подобную идеальному напряжению батареи. Эти импульсы характеризуются форм-фактором, который определяется NEMA (Национальной ассоциацией производителей электрооборудования) как код источника питания. Коды основаны на качестве выходной мощности. Вопросы применения включают стоимость привода, эксплуатационные расходы (эффективность), надежность и качество выходной мощности. Все двигатели постоянного тока с рейтингом NEMA могут работать от этого типа источника питания без использования внешних реакторов.
Все двигатели постоянного тока с рейтингом NEMA могут работать от этого типа источника питания без использования внешних реакторов. Проконсультируйтесь с заводом-изготовителем, когда используется этот тип источника питания.
Проконсультируйтесь с заводом-изготовителем, когда используется этот тип источника питания.Типы двигателей постоянного тока
В промышленности обычно используются двигатели постоянного тока четырех типов: параллельные, последовательные, со смешанной обмоткой или со стабилизированным шунтом и с постоянными магнитами. При выборе двигателя постоянного тока для данного применения необходимо учитывать два фактора: 1) Допустимое изменение скорости при заданном изменении нагрузки. 2) Допустимое изменение крутящего момента при заданном изменении нагрузки.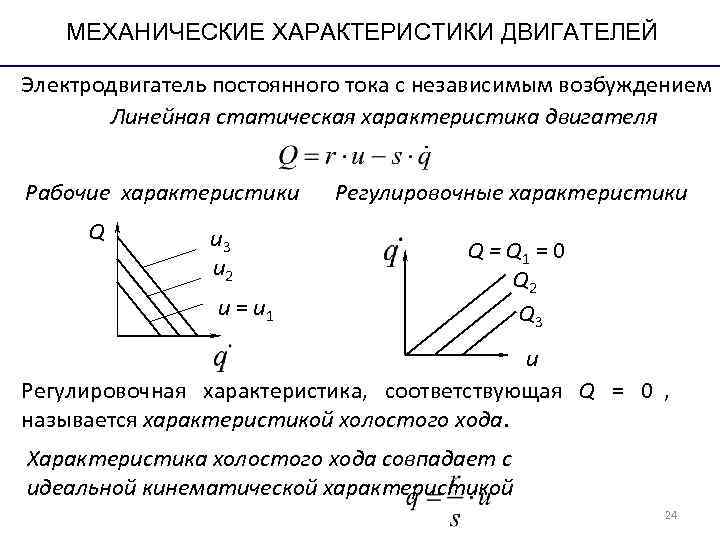
- Шунтирующие двигатели — Шунтирующий двигатель имеет якорь и возбуждение параллельно или может иметь отдельные источники питания возбуждения и якоря. В любом случае этот тип двигателя имеет хорошую регулировку скорости (от 5% до 10%) и способен развивать 300% крутящего момента при полной нагрузке в течение очень короткого периода времени.
- Двигатель серии — Как следует из названия, у серийного двигателя постоянного тока якорь и возбуждение соединены в последовательную цепь. Этот тип двигателя используется там, где нагрузка требует высокого пускового момента, например, в локомотивах, кранах или буровых установках. Пусковой крутящий момент, развиваемый серийным двигателем, может достигать 500 % от номинального крутящего момента при полной нагрузке. Серийный двигатель способен обеспечить такой высокий пусковой момент благодаря тому, что его поле работает ниже насыщения. Следовательно, увеличение нагрузки приведет к увеличению как тока якоря, так и тока возбуждения. В результате поток якоря и поток поля увеличиваются вместе. Поскольку крутящий момент, развиваемый в двигателе постоянного тока, зависит от взаимодействия якоря и потоков возбуждения, крутящий момент увеличивается на квадрат значения увеличения тока. Следовательно, последовательный двигатель будет давать большее увеличение крутящего момента, чем параллельный двигатель, при заданном увеличении тока. Регулировка скорости последовательного двигателя по своей природе хуже, чем у параллельного двигателя. Если нагрузка на двигатель уменьшается, ток, протекающий как в цепи якоря, так и в цепях возбуждения, уменьшается, что приводит к уменьшению их плотности потока. Это приводит к большему увеличению скорости, чем было бы реализовано в шунтирующем двигателе. Если бы механическая нагрузка была полностью снята с двигателя, скорость неограниченно увеличивалась бы до тех пор, пока центробежные силы, создаваемые якорем, не разрушили бы двигатель. По этой причине последовательные двигатели постоянного тока всегда должны быть подключены к нагрузке.
- Двигатели с комбинированной обмоткой — Эти двигатели используются всякий раз, когда необходимо получить характеристику регулирования скорости, недостижимую ни для последовательного, ни для параллельного двигателя. Этот тип двигателя обеспечивает довольно высокий пусковой момент и обеспечивает постоянную скорость под нагрузкой. Эта характеристика достигается включением части цепи возбуждения последовательно с цепью якоря. Эту конфигурацию не следует путать с промежуточными полюсами, которые содержат только несколько
витки провода с целью нейтрализации реакции якоря. При приложении нагрузки увеличивающийся ток через последовательную обмотку увеличивает магнитный поток, тем самым увеличивая выходной крутящий момент двигателя. В результате это увеличение потока поля приведет к большему снижению скорости при данном изменении нагрузки, чем шунтирующий двигатель. - Двигатели с постоянными магнитами — Двигатели с постоянными магнитами обычно используются там, где важным фактором является время отклика. Их скоростная характеристика аналогична двигателю с параллельным возбуждением. Они построены с обычным типом якоря, но имеют постоянные магниты в секции возбуждения, а не обмотки. Двигатели с постоянными магнитами считаются менее дорогими в эксплуатации, поскольку они не требуют внешнего питания. Однако они могут терять свой магнетизм с возрастом и в результате создавать крутящий момент ниже номинального. Некоторые двигатели с постоянными магнитами имеют обмотки, встроенные в магниты возбуждения для повторного намагничивания.
 В результате поток якоря и поток поля увеличиваются вместе. Поскольку крутящий момент, развиваемый в двигателе постоянного тока, зависит от взаимодействия якоря и потоков возбуждения, крутящий момент увеличивается на квадрат значения увеличения тока. Следовательно, последовательный двигатель будет давать большее увеличение крутящего момента, чем параллельный двигатель, при заданном увеличении тока. Регулировка скорости последовательного двигателя по своей природе хуже, чем у параллельного двигателя. Если нагрузка на двигатель уменьшается, ток, протекающий как в цепи якоря, так и в цепях возбуждения, уменьшается, что приводит к уменьшению их плотности потока. Это приводит к большему увеличению скорости, чем было бы реализовано в шунтирующем двигателе. Если бы механическая нагрузка была полностью снята с двигателя, скорость неограниченно увеличивалась бы до тех пор, пока центробежные силы, создаваемые якорем, не разрушили бы двигатель. По этой причине последовательные двигатели постоянного тока всегда должны быть подключены к нагрузке.
В результате поток якоря и поток поля увеличиваются вместе. Поскольку крутящий момент, развиваемый в двигателе постоянного тока, зависит от взаимодействия якоря и потоков возбуждения, крутящий момент увеличивается на квадрат значения увеличения тока. Следовательно, последовательный двигатель будет давать большее увеличение крутящего момента, чем параллельный двигатель, при заданном увеличении тока. Регулировка скорости последовательного двигателя по своей природе хуже, чем у параллельного двигателя. Если нагрузка на двигатель уменьшается, ток, протекающий как в цепи якоря, так и в цепях возбуждения, уменьшается, что приводит к уменьшению их плотности потока. Это приводит к большему увеличению скорости, чем было бы реализовано в шунтирующем двигателе. Если бы механическая нагрузка была полностью снята с двигателя, скорость неограниченно увеличивалась бы до тех пор, пока центробежные силы, создаваемые якорем, не разрушили бы двигатель. По этой причине последовательные двигатели постоянного тока всегда должны быть подключены к нагрузке.
 Их скоростная характеристика аналогична двигателю с параллельным возбуждением. Они построены с обычным типом якоря, но имеют постоянные магниты в секции возбуждения, а не обмотки. Двигатели с постоянными магнитами считаются менее дорогими в эксплуатации, поскольку они не требуют внешнего питания. Однако они могут терять свой магнетизм с возрастом и в результате создавать крутящий момент ниже номинального. Некоторые двигатели с постоянными магнитами имеют обмотки, встроенные в магниты возбуждения для повторного намагничивания.
Их скоростная характеристика аналогична двигателю с параллельным возбуждением. Они построены с обычным типом якоря, но имеют постоянные магниты в секции возбуждения, а не обмотки. Двигатели с постоянными магнитами считаются менее дорогими в эксплуатации, поскольку они не требуют внешнего питания. Однако они могут терять свой магнетизм с возрастом и в результате создавать крутящий момент ниже номинального. Некоторые двигатели с постоянными магнитами имеют обмотки, встроенные в магниты возбуждения для повторного намагничивания.Опасные условия для двигателей постоянного тока
Открытые неизолированные компоненты двигателей постоянного тока (коллектор, щеточная оснастка, болтовые соединения) уязвимы для раннего электрического отказа, когда корпус не соответствует требованиям, независимо от системы изоляции. Очень многие загрязняющие вещества, влажные или сухие, являются отличными проводниками, например, углерод, металлическая пыль и соли кислот. Точно так же все влажное проводит ток довольно хорошо даже при низком напряжении на расстоянии в несколько дюймов. Обычные масляные пары, присутствующие в большинстве атмосфер, постепенно оседают на всех поверхностях. На этих липких поверхностях затем накапливаются загрязнения, которые начинают просачиваться, замыкая или заземляя токи. Такой малый ток утечки может продолжаться годами, не приводя к фактическому отказу машины. При соблюдении определенных условий утечка становится чрезмерной, и машина может выйти из строя почти сразу.
Точно так же все влажное проводит ток довольно хорошо даже при низком напряжении на расстоянии в несколько дюймов. Обычные масляные пары, присутствующие в большинстве атмосфер, постепенно оседают на всех поверхностях. На этих липких поверхностях затем накапливаются загрязнения, которые начинают просачиваться, замыкая или заземляя токи. Такой малый ток утечки может продолжаться годами, не приводя к фактическому отказу машины. При соблюдении определенных условий утечка становится чрезмерной, и машина может выйти из строя почти сразу.
- Перегрев —
Перегрузка — это только одна из причин проблем с перегревом. Высокие температуры окружающей среды или неправильная очистка фильтров на самой машине способствуют сокращению срока службы за счет повышения рабочих температур. Это, в свою очередь, вызывает аномально высокое дифференциальное напряжение расширения, приводящее к трещинам в изоляции, которые обычно распространяются на оголенный проводник, открывая цепь из-за загрязнения. Кроме того, общеизвестным эффектом является более быстрая деградация изоляционных материалов, которые сжимаются и затвердевают, а затем постепенно теряют как прочность, так и изоляционные свойства.
характеристики. Температура окружающей среды выше 40 градусов по Цельсию также губительна для смазки, кабелей, щеток и коммутации. - Загрязнение — Непроводящие загрязняющие вещества, такие как фабричная пыль и песок, постепенно способствуют перегреву, ограничивая циркуляцию охлаждающего воздуха. Кроме того, они могут разрушить изоляцию и лак, что постепенно снижает их эффективность. Проводящие загрязняющие вещества, такие как металлическая пыль, карборунд, углерод и соль, не только способствуют перегреву, но и обеспечивают немедленную проводимость.
пути замыкания или заземления токов утечки везде, где есть контакт с электрической цепью. Нормальное дифференциальное расширение, вращательные напряжения и тепловое расширение захваченного воздуха в пустотах внутри системы изоляции в конечном итоге размыкают изолированную цепь в непредсказуемых местах. В зависимости от тяжести рабочего напряжения срок службы может измеряться годами, месяцами, днями или часами.Масляные отложения способствуют легкому прилипанию загрязняющих веществ к внутренним изолированным и открытым неизолированным поверхностям, что способствует возникновению проблем в начале срока службы. Вода от разбрызгивания или конденсации серьезно ухудшает изоляционную систему. Только вода проводит. Непроводящие загрязнения легко превращаются в проводники тока утечки. Прерывистая или случайная влажность в конечном итоге приводит к отказу в обслуживании из-за последовательных ситуаций утечки.
постепенно создайте постоянный путь для продолжения разрушительных токов короткого замыкания или заземления. - Вибрация —
Высокая вибрация усугубляет проблемы со сроком службы, подвергая вал нагрузке, что в конечном итоге приводит к фактическому короткому замыканию проводников между витками или между слоями. Кроме того, сильное напряжение вызывает трещины и трещины в изоляции проводника, что приводит к повреждению электрической цепи из-за загрязнения. Другим важным фактором является эффект наклепа, который эта вибрация оказывает на сам проводник, что приводит к разомкнутой цепи из-за проводимости или растрескивания. Проблемы с коммутацией могут возникнуть из-за подпрыгивания щеток. Продолжительная сильная вибрация утомляет металлы и может привести к выходу из строя
литье или подшипники. - Высота над уровнем моря — Стандартные характеристики двигателя основаны на работе на любой высоте до 3300 футов (1000 метров). Все высоты до 3300 футов включительно считаются такими же, как уровень моря. Снижение номинальных характеристик на большой высоте требуется из-за более низкой плотности воздуха, что требует большего охлаждения. Двигатели постоянного тока снижаются на 3% на каждые 1000 футов выше 3300 футов. В некоторых случаях для охлаждения двигателя будет достаточно вентилятора вместо использования большей рамы.
мотор. - Температура окружающей среды — Двигатели для использования в местах с аномально высокой температурой обычно рассчитаны на более высокую температуру окружающей среды за счет меньшего повышения температуры обмотки. Если температура окружающей среды выше 50 градусов C, необходимо также уделить особое внимание смазке. Несмотря на то, что можно работать при температуре окружающей среды выше 50 градусов C, следует обратиться к производителю, чтобы определить, какие шаги необходимо предпринять.
Как правило, самый простой способ снижения номинальных характеристик при высоких температурах окружающей среды — это снижение номинальной мощности и работа двигателя при ослаблении поля. Таким образом, и якорь, и поле будут работать при пониженном токе. При температуре окружающей среды ниже 40°C обычно используется стандартная машина с температурой 40°C при номинальной нагрузке. В случае, когда температура окружающей среды значительно ниже 40°C, при перегрузке может использоваться стандартный двигатель, работающий в условиях окружающей среды, при условии, что известны следующие факторы:- Известно, что температура окружающей среды всегда низкая.
- Напряжения вала, нагрузка на подшипники и коммутация одобрены заводом.
 Кроме того, общеизвестным эффектом является более быстрая деградация изоляционных материалов, которые сжимаются и затвердевают, а затем постепенно теряют как прочность, так и изоляционные свойства.
Кроме того, общеизвестным эффектом является более быстрая деградация изоляционных материалов, которые сжимаются и затвердевают, а затем постепенно теряют как прочность, так и изоляционные свойства. В зависимости от тяжести рабочего напряжения срок службы может измеряться годами, месяцами, днями или часами.
В зависимости от тяжести рабочего напряжения срок службы может измеряться годами, месяцами, днями или часами.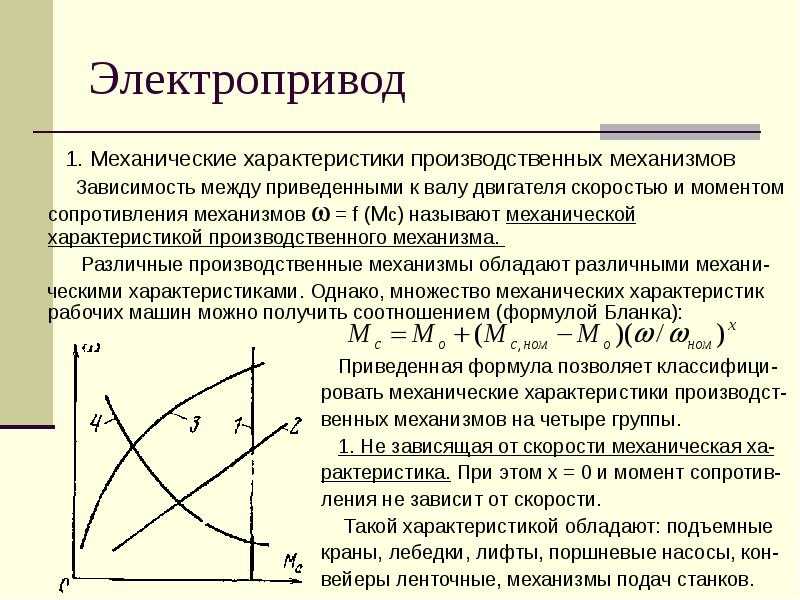 Другим важным фактором является эффект наклепа, который эта вибрация оказывает на сам проводник, что приводит к разомкнутой цепи из-за проводимости или растрескивания. Проблемы с коммутацией могут возникнуть из-за подпрыгивания щеток. Продолжительная сильная вибрация утомляет металлы и может привести к выходу из строя
Другим важным фактором является эффект наклепа, который эта вибрация оказывает на сам проводник, что приводит к разомкнутой цепи из-за проводимости или растрескивания. Проблемы с коммутацией могут возникнуть из-за подпрыгивания щеток. Продолжительная сильная вибрация утомляет металлы и может привести к выходу из строя Если температура окружающей среды выше 50 градусов C, необходимо также уделить особое внимание смазке. Несмотря на то, что можно работать при температуре окружающей среды выше 50 градусов C, следует обратиться к производителю, чтобы определить, какие шаги необходимо предпринять.
Если температура окружающей среды выше 50 градусов C, необходимо также уделить особое внимание смазке. Несмотря на то, что можно работать при температуре окружающей среды выше 50 градусов C, следует обратиться к производителю, чтобы определить, какие шаги необходимо предпринять.