Содержание
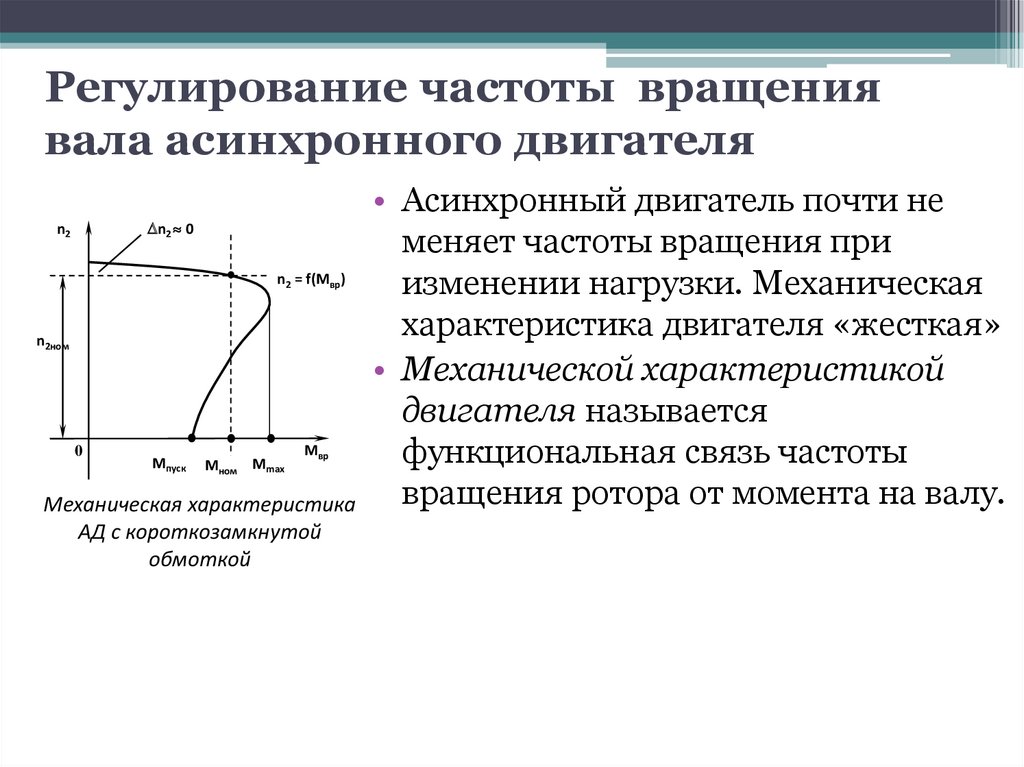
Регулирование скорости асинхронного двигателя
Асинхронный двигатель
Долгое время в промышленности использовались нерегулируемые электроприводы на базе АД, но, в последнее время возникла надобность в регулировании скорости асинхронных двигателей.
Частота вращения ротора равна
При этом, синхронная частота вращения зависит от частоты напряжения и числа пар полюсов
Исходя из этого, можно сделать вывод, что регулировать скорость АД можно с помощью изменения скольжения, частоты и числа пар полюсов.
Рассмотрим основные способы регулировки.
Регулирование скорости с помощью изменения активного сопротивления в цепи ротора
Этот способ регулирования скорости применим в двигателях с фазным ротором. При этом в цепь обмотки ротора включается реостат, которым можно плавно увеличивать сопротивление. С увеличением сопротивления, скольжение двигателя растёт, а скорость падает. Таким образом, обеспечивается регулировка скорости вниз от естественной характеристики.
Таким образом, обеспечивается регулировка скорости вниз от естественной характеристики.
Недостатком данного способа является его неэкономичность, так как при увеличении скольжения, потери в цепи ротора растут, следовательно, КПД двигателя падает. Плюс к этому, механическая характеристика двигателя становится более пологой и мягкой, из-за чего небольшое изменение момента нагрузки на валу, вызывает большое изменение частоты вращения.
Регулирование скорости данным способом не эффективно, но, несмотря на это применяется в двигателях с фазным ротором.
Регулирование скорости двигателя с помощью изменения напряжения питания
Данный способ регулирования можно осуществить, если включить в цепь автотрансформатор, перед статором, после питающих проводов. При этом, если снижать напряжение на выходе автотрансформатора, то двигатель будет работать на пониженном напряжении. Это приведёт к снижению частоты вращения двигателя, при постоянном моменте нагрузки, а также к снижению перегрузочной способности двигателя. Это связано с тем, что при уменьшении напряжения питания, максимальный момент двигателя уменьшается в квадрат раз. Кроме того, этот момент уменьшается быстрее, чем ток в цепи ротора, а значит, растут и потери, с последующим нагревом двигателя.
Это связано с тем, что при уменьшении напряжения питания, максимальный момент двигателя уменьшается в квадрат раз. Кроме того, этот момент уменьшается быстрее, чем ток в цепи ротора, а значит, растут и потери, с последующим нагревом двигателя.
Способ регулирования изменением напряжения, возможен только вниз от естественной характеристики, так как увеличивать напряжение выше номинального нельзя, потому что это может привести к большим потерям в двигателе, перегреву и выходу его из строя.
Кроме автотрансформатора, можно использовать тиристорный регулятор напряжения.
Регулирование скорости с помощью изменения частоты питания
При данном способе регулирования, к двигателю подключается преобразователь частоты (ПЧ). Чаще всего это тиристорный преобразователь частоты. Регулирование скорости осуществляется изменением частоты напряжения f, так как она в данном случае влияет на синхронную скорость вращения двигателя.
При снижении частоты напряжения, перегрузочная способность двигателя будет падать, чтобы этого не допустить, требуется повысить величину напряжения U1. Значение на которое нужно повысить, зависит от того какой привод. Если регулирование производится с постоянным моментом нагрузки на валу, то напряжение нужно изменять пропорционально изменению частоты (при снижении скорости). При увеличении скорости этого делать не следует, напряжение должно оставаться на номинальном значении, иначе это может причинить вред двигателю.
Если регулирование скорости производится с постоянной мощностью двигателя (например, в металлорежущих станках), то изменение напряжения U1 необходимо производить пропорционально квадратному корню изменения частоты f1.
При регулировании установок с вентиляторной характеристикой, необходимо изменять подводимое напряжение U1 пропорционально квадрату изменения частоты f1.
Регулирование с помощью изменения частоты, является наиболее приемлемым вариантом для асинхронных двигателей, так как при нем обеспечивается регулирование скорости в широком диапазоне, без значительных потерь и снижения перегрузочных способностей двигателя.
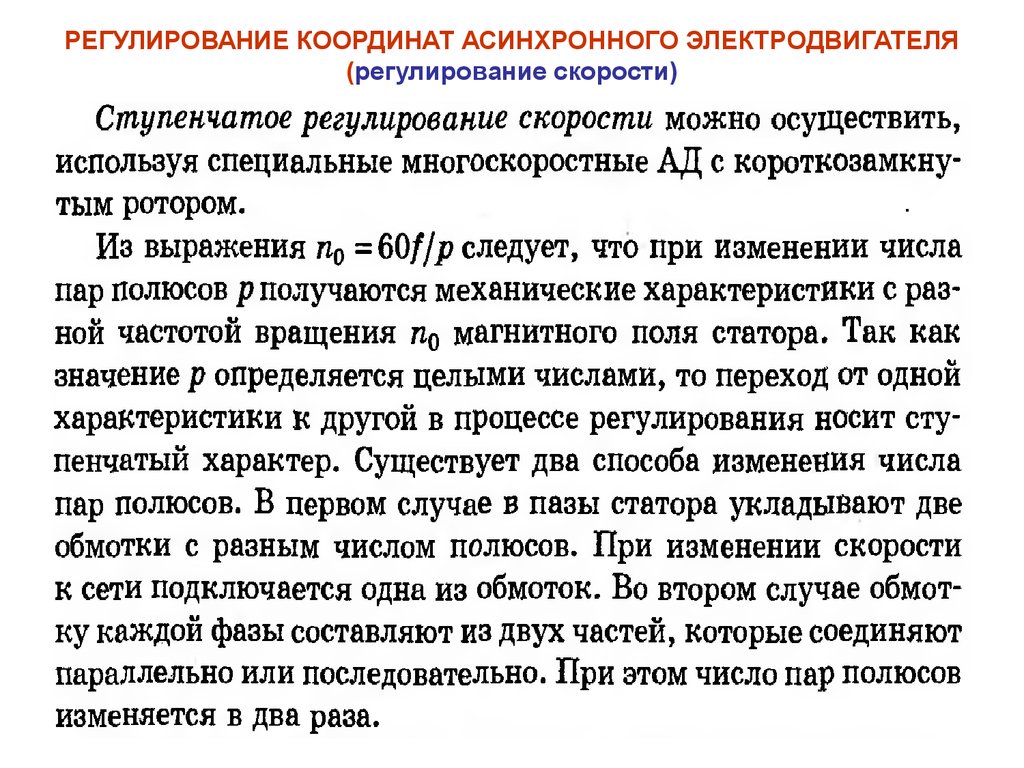
Регулирование скорости АД изменением числа пар полюсов
Такой способ регулирования возможен только в многоскоростных асинхронных двигателях с короткозамкнутым ротором, так как число полюсов этого ротора, всегда равно количеству полюсов статора.
В соответствии с формулой, которая рассматривалась выше, скорость двигателя можно регулировать изменением числа пар полюсов. Причём, изменение скорости происходит ступенчато, так как количество полюсов принимают только определённые значения – 1,2,3,4,5.
Изменение количества полюсов достигается переключением катушечных групп статорной обмотки. При этом катушки соединяются различными схемами соединения, например “звезда — звезда” или “звезда – двойная звезда”. Первая схема соединения даёт изменение количества полюсов в соотношении 2:1. При этом обеспечивается постоянная мощность двигателя при переключении. Вторая схема изменяет количество полюсов в таком же соотношении, но при этом обеспечивает постоянный момент двигателя.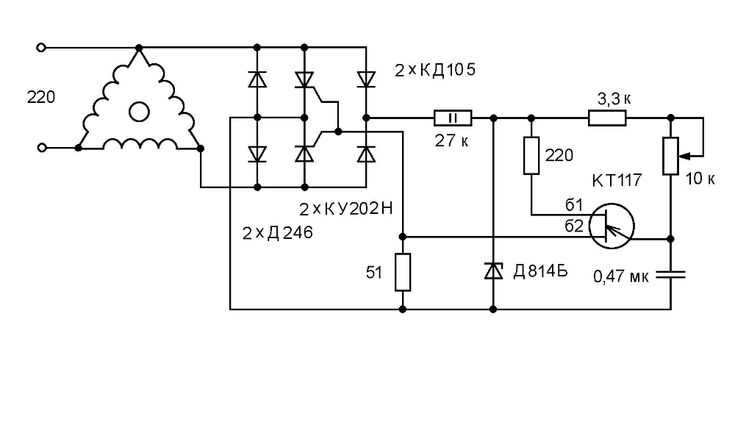
Применение данного способа регулирования оправдано сохранением КПД и коэффициента мощности при переключении. Минусом же является более сложная и увеличенная конструкция двигателя, а также увеличение его стоимости.
Читайте также — Торможение асинхронного двигателя
Все о частотных преобразователях
Частотные преобразователи — это устройства для плавного изменения частоты вращения синхронных и асинхронных двигателей посредством изменения частоты питающего тока.
В современной технике благодаря простоте конструкции и обслуживания, небольшим габаритам, высокой надёжности, и низкой стоимости огромное распространение получили именно асинхронные электродвигатели.
При работе различных устройств, в качестве привода которых применяются асинхронные электродвигатели, часто возникает необходимость в регулировании их скорости вращения.
Исходя из формулы n = (1 — S)60f/p где n — скорость вращения ротора, S — скольжение, f- частота питающей сети, p — количество пар полюсов.
Существует три способа регулирования скорости вращения асинхронного двигателя:
- — изменение скольжения. Этот способ используется в двигателях с фазным ротором. В цепь фазного ротора вводится регулировочный реостат. При использовании этого способа можно получить большой диапазон регулирования частоты вращения в сторону понижения. Однако этот способ имеет, и ряд недостатков, основным из которых является большие потери на регулировочном реостате (нагрев) т.е. снижение КПД. Как следствие этот способ применяют для кратковременного снижения частоты вращения.
- — изменение числа пар полюсов. Этот способ предполагает использование специальных двигателей (многоскоростных) имеющих более сложную обмотку статора, позволяющую изменять число пар полюсов, и короткозамкнутый ротор. Недостатком этого метода является ступенчатое регулирование (3000, 1500, 1000, 750, 600 об/мин – 1,2,3,4,5 обмотки с 1,2,3,4,5 парами полюсов соответственно), большая стоимость и громоздкость двигателя.

- — изменение частоты питающего тока (напряжения). На практике этот метод, в общем случае (самый простой), предполагает вместе с частотой изменять и действующее значение подведенного напряжения таким образом, что бы отношение U/f было постоянно. Это (изменение входного напряжения) делается для сохранения перегрузочной способности двигателя с изменением частоты сети.
В приводах центробежных насосов и вентиляторов, которые являются типичными представителями переменной механической нагрузки (момент нагрузки возрастает с увеличением скорости вращения) используется функция напряжения к квадрату частоты U/f 2 = сonst.
В более совершенных частотных регуляторах для управления скоростью вращения и электромагнитным моментом двигателя независимо, используется так называемое векторное управление. При этом виде управления необходимо управлять амплитудой и фазой статорного тока (т.е. вектором) в зависимости от положения ротора относительно обмотки статора в каждый момент времени.
Применение частотных регуляторов. Зачем нужен частотный регулятор?
Асинхронные двигатели имеют ряд недостатков (сложность регулирования скорости вращения, большие пусковые токи, относительно малый пусковой момент). Однако благодаря своей простоте, надежности и дешевизне получили огромное распространение в промышленности и быту. Применение же частотных регуляторов «устраняет» недостатки асинхронных двигателей и кроме этого позволяет избежать установки различного дополнительного оборудования, уменьшить потери в технологическом процессе, увеличить КПД самого двигателя, уменьшить износ, как самого двигателя, так и оборудования использующегося в данном технологическом процессе.
Рассмотрим более детально применение частотных регуляторов на примере насосного оборудования. Потери в технологической системе зависят от нагрузки создаваемой потребителями (на неё мы влиять не можем) и гидравлическим сопротивлением элементов этой системы. Так поддержание давления у потребителей на постоянном уровне при изменяющейся нагрузке, возможно только при использовании дополнительного оборудования (различных регуляторов давления, мембранных баков, дроссельных задвижек). Использование этого оборудования создает дополнительное гидравлическое сопротивление и как следствие снижает КПД системы в целом. При использовании частотного регулятора двигатель сам регулирует давление в сети посредством изменения частоты вращения. Кроме того при снижении технологической нагрузки уменьшая частоту вращения насоса, КПД самого насоса тоже возрастает. Таким образом достигается как бы двойной эффект увеличивается КПД системы в целом, за счёт исключения из системы лишнего гидравлического сопротивления и увеличение КПД самого насоса как агрегата.
Использование этого оборудования создает дополнительное гидравлическое сопротивление и как следствие снижает КПД системы в целом. При использовании частотного регулятора двигатель сам регулирует давление в сети посредством изменения частоты вращения. Кроме того при снижении технологической нагрузки уменьшая частоту вращения насоса, КПД самого насоса тоже возрастает. Таким образом достигается как бы двойной эффект увеличивается КПД системы в целом, за счёт исключения из системы лишнего гидравлического сопротивления и увеличение КПД самого насоса как агрегата.
Применение частотного регулятора также значительно снижает эксплуатационные затраты связанные с износом оборудования. Плавное регулирование вращения (и плавный пуск) практически полностью позволяют избежать как гидравлических ударов, так и скачков напряжения в электросети (особенно актуально в системах, где предусмотрен частый пуск/остановка насоса).
← Отопление по — новому, или как правильно выбрать котел для автономного отопления
|
Торцевые уплотнения, причины выхода со строя в насосах →
Управление скоростью асинхронного двигателя — MATLAB и Simulink
Управление скоростью асинхронного двигателя
Разработка и развертывание алгоритмов управления скоростью асинхронного двигателя с использованием Simulink
Управление скоростью асинхронного двигателя — это процесс управления токами в асинхронном двигателе для регулирования скорости. Хотя асинхронные двигатели часто используются в приложениях с фиксированной частотой, они популярны для приложений с переменной частотой, таких как промышленные приводы и электромобили. Для работы с переменной частотой инвертор модулирует ток в обмотках статора.
Хотя асинхронные двигатели часто используются в приложениях с фиксированной частотой, они популярны для приложений с переменной частотой, таких как промышленные приводы и электромобили. Для работы с переменной частотой инвертор модулирует ток в обмотках статора.
К сожалению, ваш браузер не поддерживает встроенные видео.
Скольжение и результирующий крутящий момент для асинхронного двигателя
Условные обозначения:
Желтая стрелка – результирующий крутящий момент
Пурпурная стрелка – вращающееся магнитное поле статора связь магнитных полей в статоре и роторе. Токи в статоре создают вращающееся магнитное поле, которое индуцирует токи и отстающее магнитное поле в роторе. Взаимодействие магнитного поля заставляет ротор вращаться с угловой скоростью, меньшей, чем скорость вращения поля статора. Эта задержка вращения, называемая проскальзыванием, создает крутящий момент на валу двигателя. Увеличение нагрузки на двигатель увеличивает скольжение и выходной крутящий момент двигателя.
Для асинхронного двигателя с короткозамкнутым ротором регулирование скорости с помощью управления с ориентацией поля (FOC) регулирует I d и I q таким образом, что поток пропорционален I d , а крутящий момент пропорционален I д . Такой подход увеличивает диапазон скоростей и улучшает как динамические, так и установившиеся характеристики. Simulink ® позволяет использовать многоскоростное моделирование для разработки, настройки и проверки алгоритмов FOC во всем рабочем диапазоне двигателя перед тестированием оборудования.
Эта диаграмма Simulink иллюстрирует типичный алгоритм FOC для управления скоростью трехфазного асинхронного двигателя с короткозамкнутым ротором.
Алгоритм FOC для управления скоростью асинхронного двигателя.
Основные компоненты стратегий управления асинхронными двигателями Включают:
- Внутренний контур (пропорционально-интегральный или PI)
- Регулирование тока по оси Q: регулирует ток по оси q для управления электрическим крутящим моментом, приложенным к двигателю
- Управление током по оси D: для управления ослаблением поля регулирует ток, чтобы уменьшить поток по оси d и позволить двигателю вращаться со скоростью выше базовой за счет крутящего момента
- Внешний контур (PI) : Контур управления скоростью асинхронного двигателя. Этот контур имеет более низкую частоту дискретизации по сравнению с внутренним контуром (управление током) и генерирует заданное значение крутящего момента. Заданное значение обрабатывается для создания опорного тока по осям d и q для внутреннего контура
- Преобразования Clarke, Park и Inverse Park : Преобразование между стационарной и вращающейся синхронной рамой
- Оценка скорости скольжения : Поскольку асинхронные двигатели являются асинхронными, скольжение между частотой статора и ротора оценивается для расчета синхронной скорости и положения ротора
- Пространственно-векторная модуляция (SVM) : Генерирует модулированные импульсы для управления переключателями силовой электроники в инверторе
- Датчик скорости : Скорость асинхронного двигателя можно измерить с помощью квадратурного энкодера или другого датчика. Для бездатчикового управления асинхронным двигателем алгоритм на основе наблюдателя заменяет физический датчик и оценивает скорость двигателя в режиме реального времени.
 Этот контур имеет более низкую частоту дискретизации по сравнению с внутренним контуром (управление током) и генерирует заданное значение крутящего момента. Заданное значение обрабатывается для создания опорного тока по осям d и q для внутреннего контура
Этот контур имеет более низкую частоту дискретизации по сравнению с внутренним контуром (управление током) и генерирует заданное значение крутящего момента. Заданное значение обрабатывается для создания опорного тока по осям d и q для внутреннего контура.

Simscape Electrical™ и Motor Control Blockset™ предоставляют асинхронный двигатель и примеры управления, ориентированного на поле, для разработки имитационной модели для управления скоростью асинхронного двигателя. Моделирование управления скоростью асинхронного двигателя с помощью Simulink помогает сократить время тестирования прототипа и позволяет проверить устойчивость алгоритмов управления к неисправностям, которые нецелесообразно тестировать на оборудовании.
Используя Simscape Electrical and Motor Control Blockset, инженеры по управлению двигателем разрабатывают управление скоростью асинхронного двигателя с помощью:
- Моделирования асинхронных двигателей, инверторов и регуляторов скорости и тока
- Автонастройка усиления контура управления скоростью асинхронного двигателя с использованием методов проектирования управления
- Разработка алгоритмов наблюдения для оценки положения и скорости ротора.
- Моделирование режимов запуска, выключения и ошибок, а также разработка логики снижения номинальных характеристик и защиты для обеспечения безопасной работы
- Запуск моделирования двигателя и контроллера с обратной связью для проверки производительности системы в нормальных и нештатных режимах работы
- Генерация ANSI, ISO или оптимизированного для процессора кода C и HDL из модели для быстрого прототипирования, аппаратного тестирования в цикле и внедрения в производство
Поле-ориентированное управление асинхронными двигателями с помощью Simulink и набора блоков управления двигателем.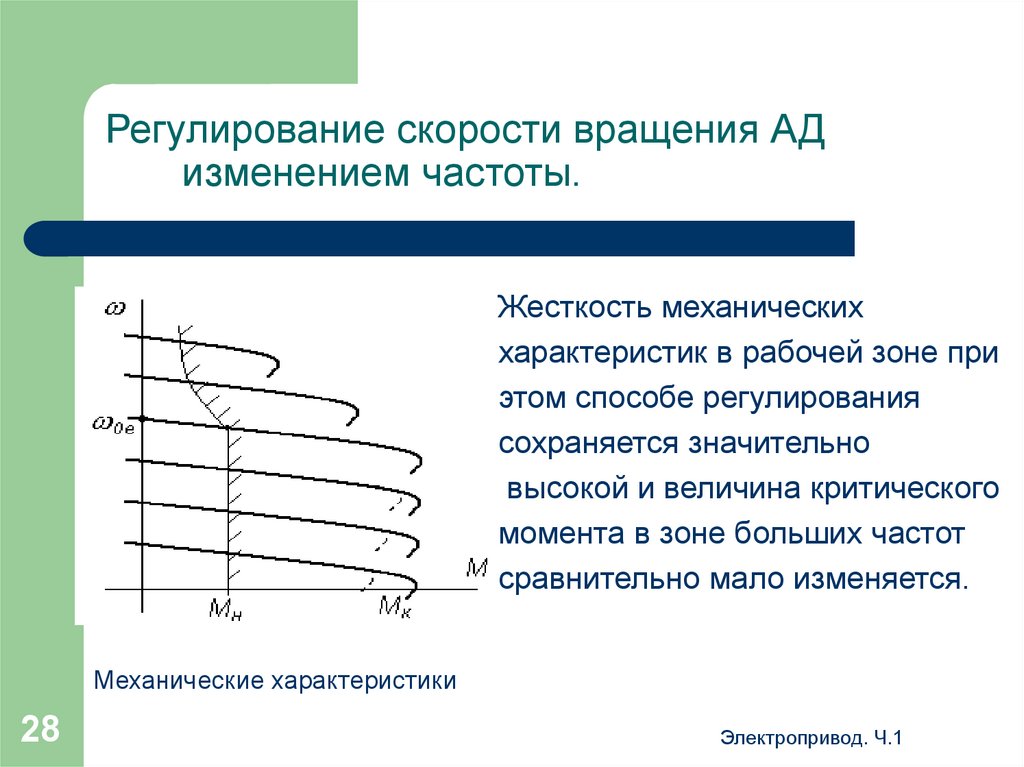
5:34
Продолжительность видео 5:34.
Поле-ориентированное управление асинхронными двигателями с помощью Simulink и блока управления двигателем
Поле-ориентированное управление асинхронными двигателями с помощью Simulink.
3 видео
Полеориентированное управление асинхронными двигателями с помощью Simulink (3 видео)
Как много вы знаете о конструкции управления силовой электроникой?
Начать тест
Примеры и инструкции
Ориентированное на поле управление асинхронными двигателями с помощью Simulink и блока управления двигателем (5:34)
— Видео
Прямое управление крутящим моментом асинхронной машины с модулятором пространственного вектора
— Пример
Бездатчиковое полеориентированное управление асинхронным двигателем
— Пример
Поле-ориентированное управление асинхронным двигателем с использованием датчика скорости
— Пример
Управление без обратной связи и калибровка двигателя переменного тока
— Пример
Полеориентированное управление индукционной машиной
— Пример
Справочник по программному обеспечению
Индукционный двигатель
— Документация
Опорные сигналы управления асинхронным двигателем, ориентированные на поле
— Документация
Оценщик скорости скольжения для асинхронного двигателя
— Документация
Поле-ориентированное управление приводом асинхронного двигателя
— Документация
Учебники и примеры глубокого обучения — MATLAB и Simulink.
Переходите от простых задач к более сложным маневрам, просматривая интерактивные примеры и учебные пособия.
Изучите примеры управления двигателем
Ознакомьтесь с примерами преобразования энергии
Изучите примеры питания от батарей
Изучите сообщество Power Electronics Control Community
Сообщество MathWorks для студентов, исследователей и инженеров, использующих Simulink для управления силовой электроникой в электромобилях, возобновляемых источниках энергии, аккумуляторных системах, преобразовании энергии и управлении двигателем.
Начать обсуждение
Смотреть видео
Испытания.
Получите бесплатную пробную версию
30 дней исследования в ваших руках.
Загрузить сейчас
Понимание алгоритмов управления двигателем BLDC
Читать электронную книгу
Выберите сеть
Сайт
Выберите веб-сайт, чтобы получить переведенный контент, где он доступен, и посмотреть местные события и
предложения. На основе
На основе
ваше местоположение, мы рекомендуем вам выбрать: .
Вы также можете выбрать веб-сайт из следующего списка:
Европа
Обратитесь в местный офис
VFD или Triac для асинхронных двигателей переменного тока?
Когда на асинхронный двигатель переменного тока подается напряжение, он работает с определенной скоростью. Требования к переменной скорости для асинхронных двигателей переменного тока обычно выполняются с помощью трехфазного двигателя и инвертора или частотно-регулируемого привода. Этот пост в блоге также представляет еще один вариант.
Во-первых, давайте поговорим о наиболее распространенном методе управления скоростью асинхронных двигателей переменного тока, которым является инвертор или частотно-регулируемый привод (ЧРП). Я больше всего знаком с серией Fuji Electric FRENIC Mini C2.
ЧРП Fuji Electric FRENIC Mini серии C2
Как это устройство управляет скоростью двигателя переменного тока? Давайте сначала поймем, почему двигатель будет работать с определенной скоростью.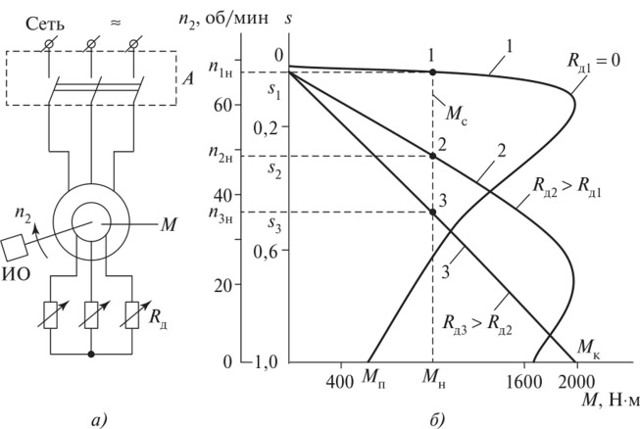 С математической точки зрения, синхронная скорость двигателя рассчитывается как:
С математической точки зрения, синхронная скорость двигателя рассчитывается как:
Большинство промышленных асинхронных двигателей переменного тока являются 4-полюсными, поэтому скорость двигателя синхронизируется с частотой входного питания (Гц). При частоте 60 Гц двигатель будет работать со скоростью 1800 об/мин.
Преобразователь частоты управляет скоростью двигателя с помощью ШИМ (широтно-импульсной модуляции) для изменения частоты источника питания, подаваемого на двигатель. Обычно от двигателя не поступает обратной связи; хотя некоторые приводы используют обратную ЭДС в качестве обратной связи.
Вот блок-схема логики управления частотно-регулируемым приводом FRENIC Mini C2 (из руководства). Обратите внимание на его сложность только из-за огромного количества компонентов. Такие функции, как динамическое увеличение крутящего момента или управление компенсацией скольжения, обычно предлагаются для повышения производительности.
Одним из недостатков использования частотно-регулируемых приводов является то, что они могут стать дорогими и сложными для измерения. Также требуется 3-фазный асинхронный двигатель переменного тока с номинальным режимом работы инвертора или, по крайней мере, с режимом непрерывного режима работы. Если двигатель оснащен тормозным механизмом, он обычно снижает рабочий цикл. Раньше я видел на рынке частотно-регулируемые приводы для однофазных двигателей, но их трудно найти, и мы никогда не тестировали их с нашими двигателями.
Также требуется 3-фазный асинхронный двигатель переменного тока с номинальным режимом работы инвертора или, по крайней мере, с режимом непрерывного режима работы. Если двигатель оснащен тормозным механизмом, он обычно снижает рабочий цикл. Раньше я видел на рынке частотно-регулируемые приводы для однофазных двигателей, но их трудно найти, и мы никогда не тестировали их с нашими двигателями.
Другой способ управления скоростью однофазных асинхронных двигателей переменного тока?
Теперь рассмотрим еще один метод управления скоростью. Взгляните на кривую скорости крутящего момента однофазного асинхронного двигателя переменного тока, которая описывает, что двигатель будет делать после включения. Двигатель запустится со скоростью 0 об/мин, затем разгонится до номинальной скорости. Обратите внимание, как входное напряжение влияет на форму кривой скорости-крутящего момента. Если момент нагрузки остается прежним, а входное напряжение уменьшается со 100 В до 90 В, скорость двигателя уменьшается. Да, можно использовать напряжение для управления скоростью двигателя переменного тока .
Да, можно использовать напряжение для управления скоростью двигателя переменного тока .
ПРИМЕЧАНИЕ. Максимальная скорость составляет ~1500 об/мин, поскольку входная мощность составляет 50 Гц. Для двигателей с частотой 60 Гц 1500 об/мин будут равны 1800 об/мин.
Тем не менее, вы можете видеть, что скорость не сильно снижается при падении напряжения на 10В. Если напряжение уменьшится слишком сильно, двигатель может работать в нестабильной области (менее ~ 1000 об/мин) и, возможно, заглохнуть. В идеале вы действительно хотите, чтобы двигатель работал на оптимальной номинальной скорости для наилучшей и наиболее эффективной работы. Этот метод управления скоростью очень похож на метод управления скоростью щеточных двигателей постоянного тока. Однако диапазон оборотов регулирования скорости намного шире для коллекторных двигателей постоянного тока.
Чтобы этот метод управления был успешным, необходимо устройство обратной связи для замыкания цепи между двигателем и регулятором скорости.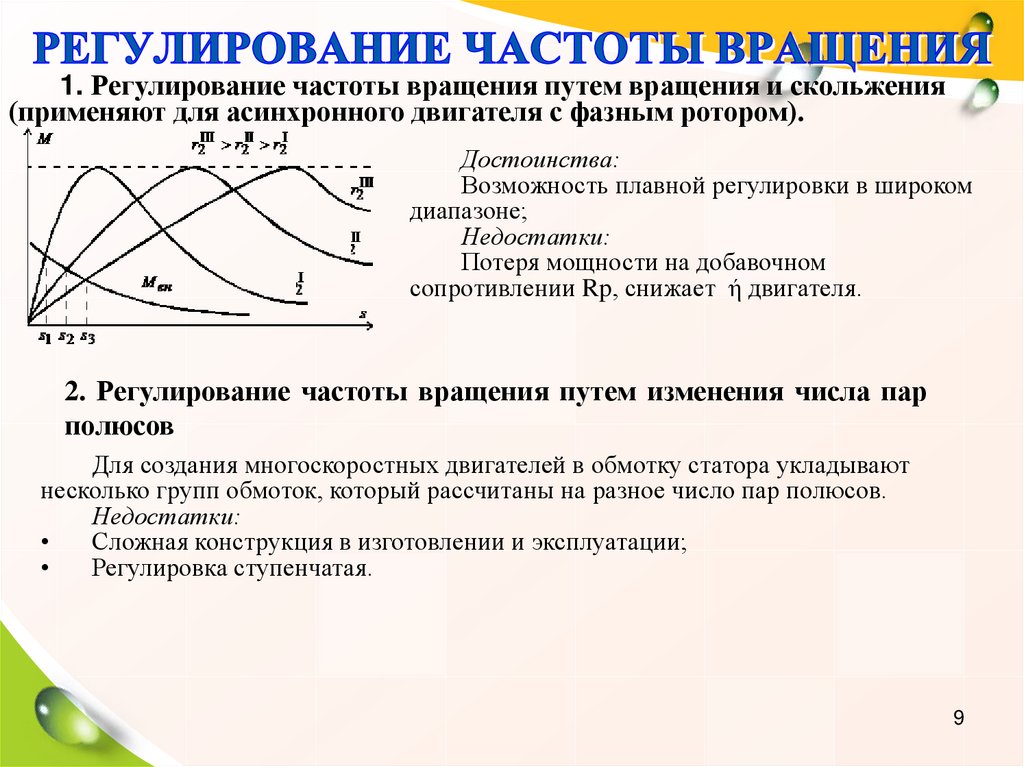 Эта обратная связь необходима для предотвращения слишком сильных колебаний скорости двигателя (и входного напряжения).
Эта обратная связь необходима для предотвращения слишком сильных колебаний скорости двигателя (и входного напряжения).
Компания Oriental Motor использует тахогенераторы для замыкания контура между нашими двигателями с регулируемой скоростью переменного тока и регуляторами скорости, такими как серия DSC или серия US2. Тахогенератор, он же тахометр, генерирует напряжение, пропорциональное скорости. Он используется в непрерывном контуре обратной связи, чтобы поддерживать точность скорости на уровне ±1% или меньше.
Это упрощенная схема цепи управления для серии DSC.
Для всех, кто заинтересован, это схема цепи управления с более подробной информацией. Вы можете видеть, что мы используем симистор для управления напряжением. Мы также используем однополупериодный выпрямитель.
Показывает, как тахогенератор используется во время работы двигателя.
Поскольку схема управления намного проще, чем у ЧРП, двигатели переменного тока с регулированием скорости являются более экономичным вариантом по сравнению с двигателями переменного тока с приводом от ЧРП. Метод управления фазой также демонстрирует меньший электрический шум по сравнению с двигателями с частотно-регулируемым приводом, где частотно-регулируемый привод переключается с гораздо большей скоростью.
Метод управления фазой также демонстрирует меньший электрический шум по сравнению с двигателями с частотно-регулируемым приводом, где частотно-регулируемый привод переключается с гораздо большей скоростью.
Еще одним преимуществом серии DSC является вертикальная работа. В прошлом двигатели с тахогенератором были проблемой для вертикального перемещения. Причина в гравитации.
В этом примере двигатель перемещает груз вниз по ленточному конвейеру. Когда груз опускается, сила тяжести будет тянуть груз вниз и увеличивать его скорость. С увеличением скорости увеличивается напряжение тахогенератора. Это заставляет контроллер скорости думать, что двигатель вращается слишком быстро, таким образом снижая его напряжение, чтобы попытаться снизить скорость. Однако при снижении напряжения двигатель теряет крутящий момент. Этот процесс повторяется до тех пор, пока крутящий момент двигателя не будет исчерпан и нагрузка не упадет. В серии DSC функция остановки при замедлении обеспечивает управляемое замедление с автоматическим электромагнитным торможением. |
Недостаток двигателей переменного тока с регулированием скорости с тахогенераторной обратной связью заключается в том, что при низких скоростях двигатель имеет определенные ограничения по крутящему моменту. Кривая крутящего момента двигателя помечена, чтобы показать это. Убедитесь, что работаете ниже «линии безопасной работы». Типы комбинаций (мотор-редукторы) см. пунктирную линию «Допустимый крутящий момент для комбинированного типа».
Другими словами, чтобы избежать этой проблемы, используйте мотор-редуктор.
Чтобы узнать больше о серии DSC или методе управления скоростью, ознакомьтесь с информационным документом.
Подпишитесь в правом верхнем углу страницы!
| Есть ли другая альтернатива? |
Если требуется работа при более низкой температуре, более высокая энергоэффективность, лучшее регулирование скорости, постоянный выходной крутящий момент или более широкий диапазон скоростей, идеально подходят. |